
Жуки вдохновили инженеров на создание датчика прикосновений
На создание сенсора ученых вдохновила система фиксации надкрыльев у некоторых жуков. Она состоит из ворсинок, которые смыкаются друг с другом, когда надкрылья насекомых закрыты и находятся в покое. В какой-то степени система напоминает застежки-липучки с тем различием, что не имеет крючков - ворсинки соединяются друг с другом только за счет поверхностных Ван-дер-Ваальсовых взаимодействий.
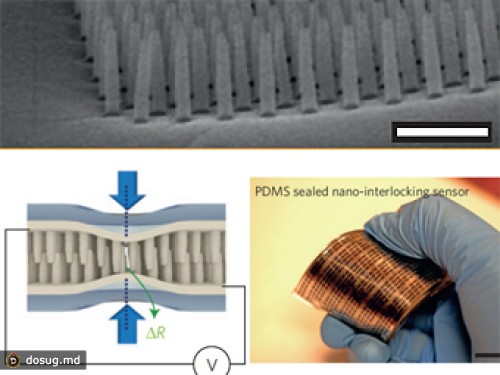
Подобным же образом устроен и датчик, созданный инженерами из Сеульского Национального Университета. Он состоит из двух полимерных пластин, несущих ворсинки, высота которых составляет около микрометра, а диаметр в десять раз меньше. На ворсинки напыляется металлическое покрытие, которое делает их поверхность проводящей.
Две пластины соединяются друг с другом ворсистыми сторонами лицом к лицу и присоединяются к датчику сопротивления. Ток может относительно свободно проходить с одной пластины на другую, а сопротивление зависит от общей площади соприкосновения между ворсинками. При малейшем изменении положения ворсинок сопротивление меняется, что и является основой работы датчика.
Созданный авторами прототип оказался способен фиксировать давление всего в 5 паскаль, что соответствует воздействию тела весом в пять грамм на площадь в один квадратный метр. Уникальность сенсора заключается в том, что, анализируя изменение сопротивления, авторы научились различать разные способы механического воздействия: давление, сдвиг и кручение. Таким же свойством обладает и кожа животных, но искусственные сенсоры до сих пор были на это не способны.
Инженеры продемонстрировали способности прототипа, записав перемещение по нему божьей коровки и течение капли воды. Кроме того, при установке на запястье человека, детектор оказался способен определять пульс.
Ранее другая группа инженеров научила роботов различать поверхности, текстуру которых не может отличить даже человек. Разработка опиралась на обычные, коммерчески доступные сенсоры и касалась только оптимизации алгоритмов, при помощи которых роботы ощупывают материалы и анализируют полученные данные.